I should be able to make a plastic filament extruder. I intend to mount this on the z-axis to make an FDM machine capable of making the plastic parts of the RepRap Darwin. I should also be able to mill and drill the Darwin PCBs. Once I make the Darwin I will be synchronised with the RepRap project and thus able to make the successive generations, whatever they may be, because the RepRap idea is that each new generation can be made by the previous one.
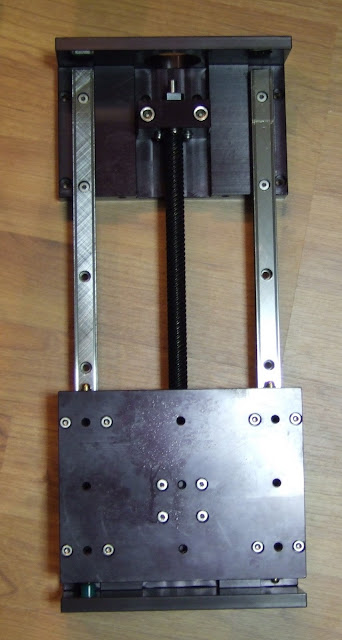
That was my original aim but my axes should out perform the Darwin axes in all respects except build volume. Darwin aims to achieve 0.1 mm accuracy with a 300 mm cube build area. I expect to get 0.006 mm accuracy on X and Y and 0.05 mm accuracy on Z over a 150 mm cube. That means rather than just using my machine as a RepStrap I will continue to use it for anything that doesn't need the larger build area. I then got the idea that I would be using many different heads on the same Cartesian engine, hence the name HydraRaptor. Initially these will be manually exchanged but I have a plan to mount the heads, spoke like, on a rotating wheel fastened to the z-axis.